Configuration file
File: drives.script
Pauline's main configuration file is drives.script. Its contents will be determined by yourself, depending on the type of drives connected to Pauline (Shugart, PC Drive, Apple, ...).
See the appendices for the assignment of the connectors according to their positions on the 34-pin floppy drive.
You have multiple options to modify this file:
- Access the contents of the SD CARD in an external drive
- FTP or SAMBA network sharing
- SSH (using the
vicommand) - USB (by connecting Pauline to your PC)
Either way, you can find it in the \pauline\Settings folder.
"Shugart" drives
Shugart drives can have 4 different select lines and 1 motor line. The motor-on is common to all floppy drives on the same bus.
"PC" drives
Pauline allows you to control 2 drives. Drives A and B.
Example with the use of a 3.5" PC drive
set DRIVE_0_DESCRIPTION "3.5-inch Floppy drive"
set DRIVE_0_SELECT_LINE DRIVES_PORT_DRVSA
set DRIVE_0_MOTOR_LINE DRIVES_PORT_MOTEA
set DRIVE_0_MAX_STEPS 82
Operation modes
There are 3 different available modes:
- GENERIC
- APPLE_MACINTOSH
- APPLE_II
"GENERIC_FLOPPY_INTERFACE"
If you use "Shugart" or "PC Drive" type drives:
Use the command:
set DRIVES_INTERFACE_MODE "GENERIC_FLOPPY_INTERFACE"
"APPLE_MACINTOSH_FLOPPY_INTERFACE"
"MACINTOSH" type drives require a special interface.
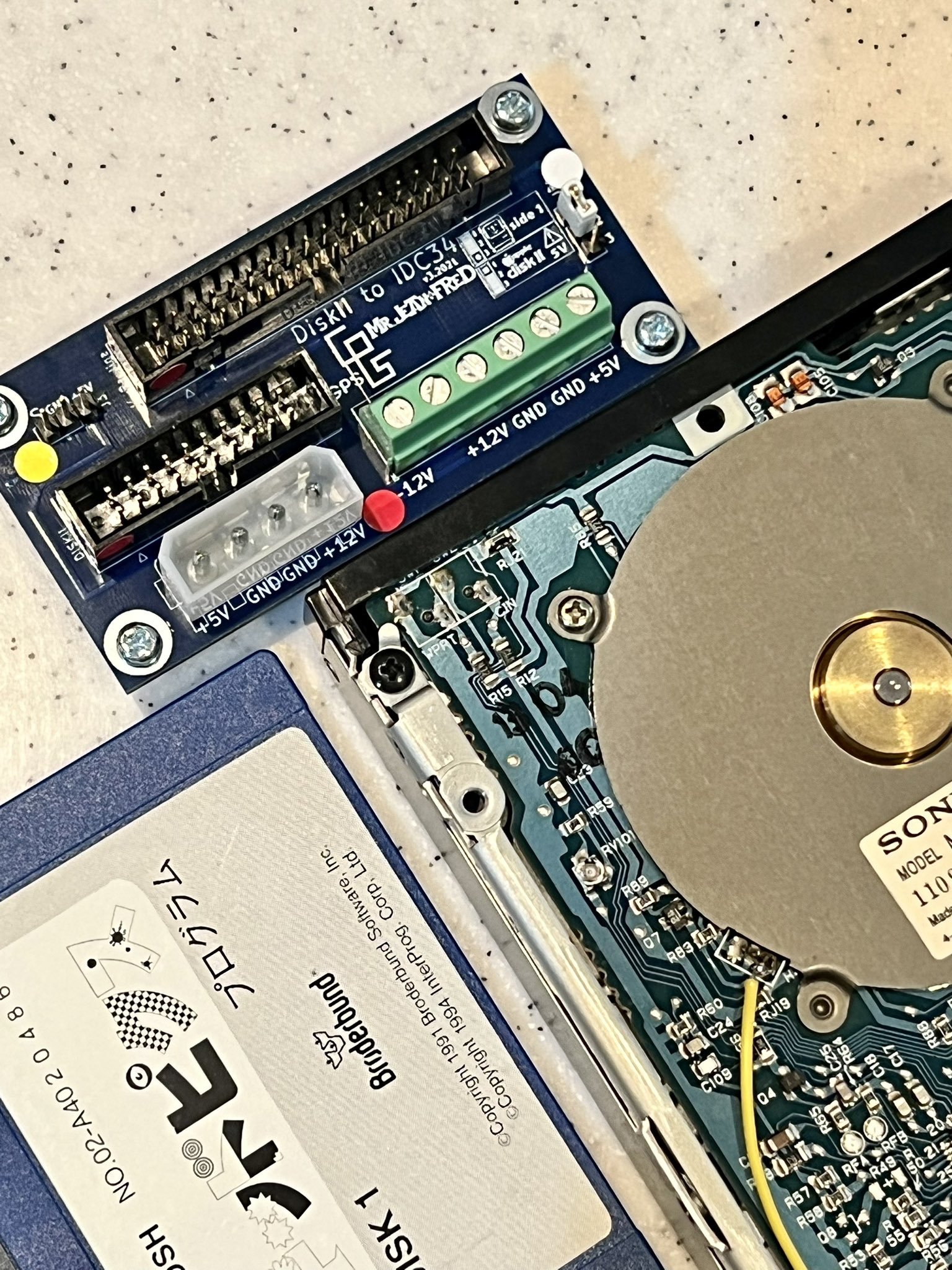
The index signal will be picked up on the drive's PCB.
Use the command:
set ENABLE_APPLE_MODE 1
You can change the desired Macintosh drive mode (GCR or MFM) on the control web page.
Use the command:
set MACINTOSH_GCR_MODE 0
- 0 => MFM disks,
- 1 => GCR disks.
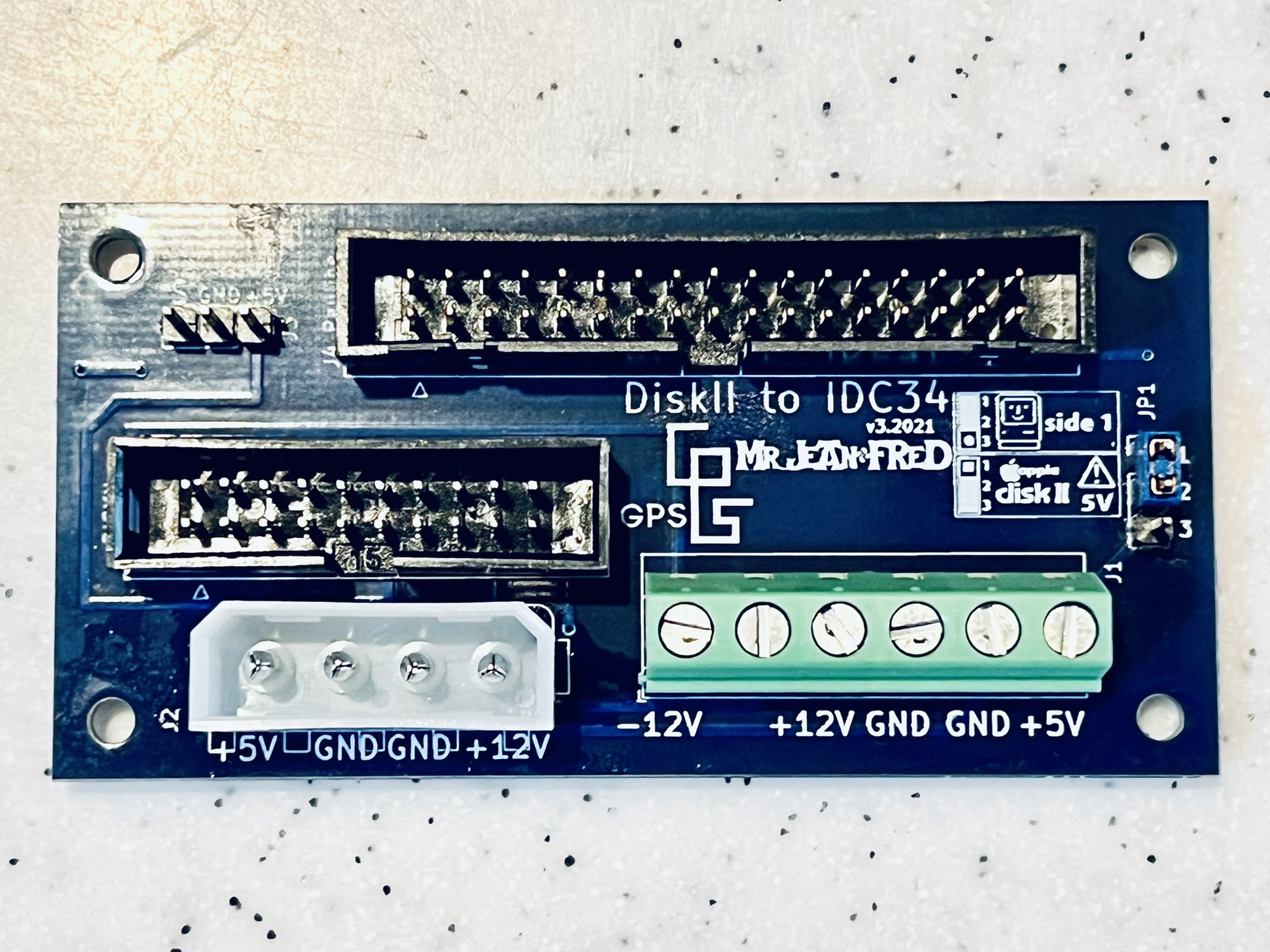
"APPLE_II_FLOPPY_INTERFACE"
"Apple DISK II" type drives require a special interface and the installation of a sensor to get the index signal.
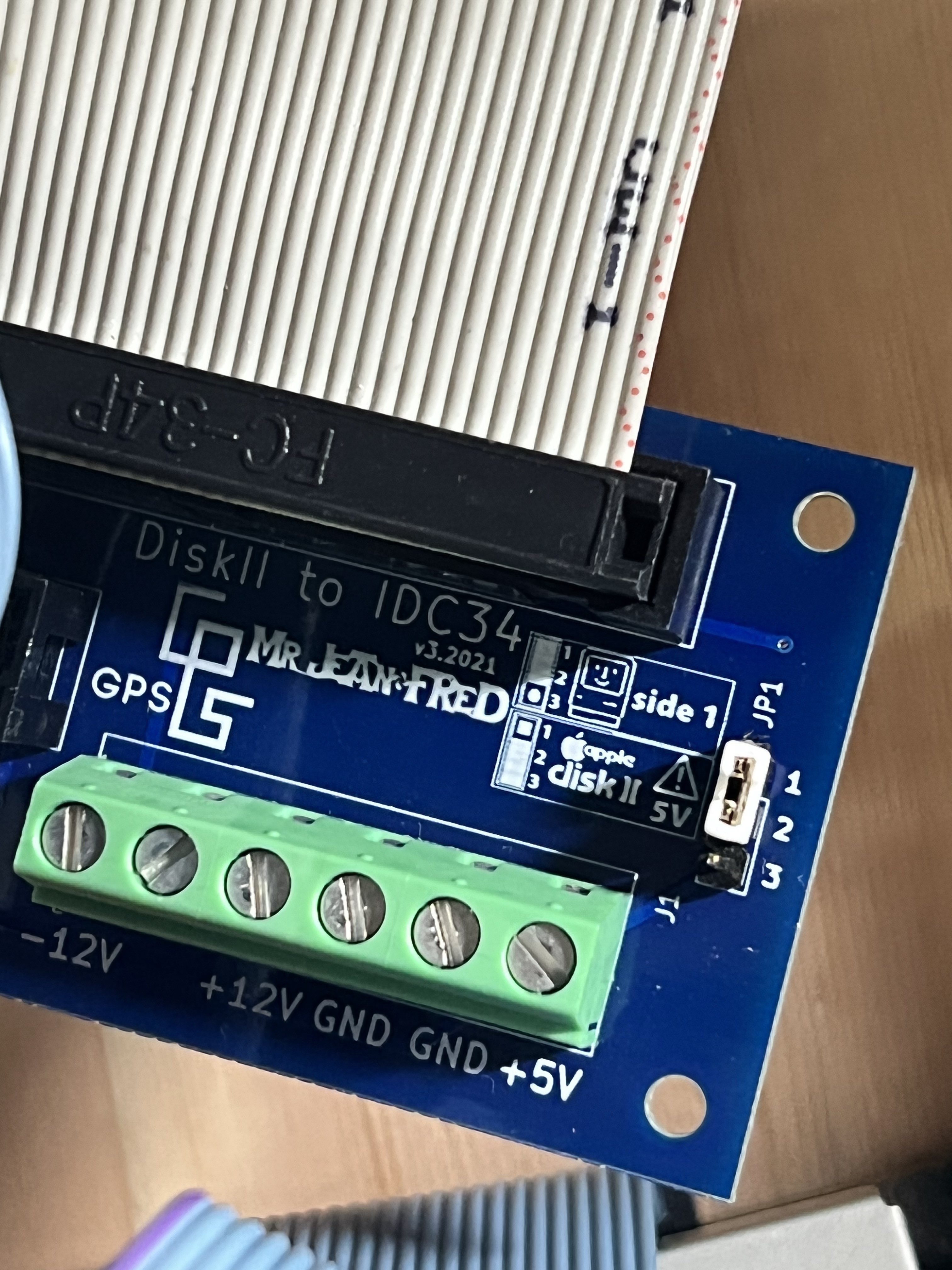

Use the command:
set DRIVES_INTERFACE_MODE "APPLE_II_FLOPPY_INTERFACE"
set ENABLE_APPLE_MODE 1
Shugart Floppy disk drives
Shugart drives can have 4 differents select lines and 1 motor line. The motor-on is common to all floppy drives on the same bus.
Possible Shugart select lines (one per drive !):
DRIVES_PORT_DS0, DRIVES_PORT_DS1 , DRIVES_PORT_DS2 , DRIVES_PORT_DS3
PC Floppy disk drives
PC drives can have 2 differents settings:
- Drive "A:"
Select Line: DRIVES_PORT_DRVSA
Motor Line: DRIVES_PORT_MOTEA
- Drive "B:"
Select Line: DRIVES_PORT_DRVSB
Motor Line: DRIVES_PORT_MOTEB
Please note that some pin names are aliased
DRIVES_PORT_DS0,DRIVES_PORT_MOTEAandDRIVES_PORT_PIN10point to the same pin 10.DRIVES_PORT_DS1,DRIVES_PORT_DRVSBandDRIVES_PORT_PIN12point to the same pin 12.DRIVES_PORT_DS2,DRIVES_PORT_DRVSAandDRIVES_PORT_PIN14point to the same pin 14.DRIVES_PORT_MOTON,DRIVES_PORT_MOTEBandDRIVES_PORT_PIN16point to the same pin 16.DRIVES_PORT_DS3andDRIVES_PORT_PIN6point to the same pin 6.
PC and Shugart drives installed on the same floppy bus
In order to avoid signal conflicts in some cases when using a Shugart and a PC drive on the same bus:
Working case 1
PC drive as "A:" (DRIVES_PORT_DRVSA + DRIVES_PORT_MOTEA)
Shugart drives can be installed on DS1 (DRIVES_PORT_DS1 + DRIVES_PORT_MOTON) and on DS3 (DRIVES_PORT_DS3 + DRIVES_PORT_MOTON).
Working case 2
PC drive as "B:" (DRIVES_PORT_DRVSB + DRIVES_PORT_MOTEB)
Shugart drives can be installed on DS0 (DRIVES_PORT_DS0 + DRIVES_PORT_MOTON), on DS2 (DRIVES_PORT_DS2 + DRIVES_PORT_MOTON), and on DS3 (DRIVES_PORT_DS3 + DRIVES_PORT_MOTON).
Twisted PC floppy ribbon
A twisted PC floppy ribbon exchanges drives A and B select and motor signals.
You can use Shugart drives with a twisted PC floppy ribbon but remember that you may have to "mirror" your settings (DS0 become Motor-on, DS1 become DS2, Motor-on become DS0) If the drive is behind a twist you can use these aliases to set it up:
Shugart drives
DRIVES_PORT_DS0_TWISTED_RIBBONDRIVES_PORT_DS1_TWISTED_RIBBONDRIVES_PORT_DS2_TWISTED_RIBBONDRIVES_PORT_MOTON_TWISTED_RIBBON
PC drives
DRIVES_PORT_DRVSA_TWISTED_RIBBONDRIVES_PORT_MOTEA_TWISTED_RIBBONDRIVES_PORT_DRVSB_TWISTED_RIBBONDRIVES_PORT_MOTEB_TWISTED_RIBBON
Miscellaneous
Suppress buzzer sounds
set PAULINE_UI_SOUND 0
Delay and Width
Additionnal drive spin up delay when the motor is turned on. (in milli-seconds)
set DRIVE_MOTOR_SPINUP_DELAY 2000
Delay to wait after the head load (in milli-seconds)
set DRIVE_HEAD_LOAD_DELAY 250
Delay to wait after the head load (in micro-seconds)
set DRIVE_HEAD_STEP_RATE 24000
set DRIVE_HEAD_SETTLING_TIME 12000
Typical minimum values:
- 3.5" -> 2ms (2000)
- 5.25" -> 12ms (12000)
Step signal width (Shugart drives). (in micro-seconds)
set DRIVE_STEP_SIGNAL_WIDTH 8
Apple Phases signal output width
DRIVE_STEP_PHASES_STOP_WIDTH timing is used at the last step.
It is recommended to increase the DRIVE_HEAD_SETTLING_TIME value at least to the DRIVE_STEP_PHASES_STOP_WIDTH value or more to be sure that the head is well stabilized.
set DRIVE_STEP_PHASES_WIDTH 50000
set DRIVE_STEP_PHASES_STOP_WIDTH 50000
Set the index signal polarity:
- 0 -> Active low (default)
- 1 -> Active high
Useful if you use a custom index sensor:
set DRIVE_INDEX_SIGNAL_POLARITY 0
Tips and tricks
Reading the comments in the "drives.script" file may provide additional information to this documentation.
In the next updates, a profile system will be implemented in the web interface. For the moment the configuration parameters are managed both in the web interface for some commands and in drives.script file
We advise you to make copies of the file in the pauline\Settings folder, renaming the file according to the drives connected to Pauline.
Examples
drives-PC-5.25-Drive-0+1.scriptfor a 5.25" PC drive plugged into Drive A or Drive B on ribbon cabledrives-PC-3.5-Drive-0.scriptfor a 3.5" PC drive connected to Drive A on the ribbon cabledrives-Apple-DISK-II-Drive-0.scriptfor an Apple DISK II drive connected to Drive A on the ribbon cable
Commenting the first lines of the file drives-XXXX.script are also a good practice, especially for sharing with others:
#
# Pauline drives configuration file PC 5.25" Drive 0 (before twist)
# Comments can save kitten
#